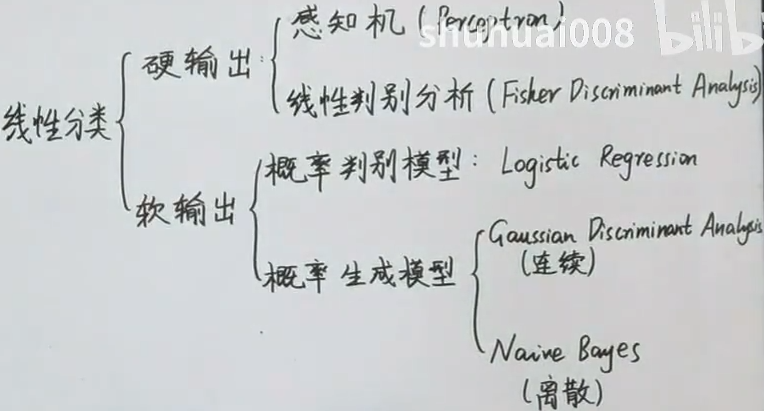
Table of contents
3 线性判别分析 (Fisher判别分析) - 模型定义
Data:
$$ \begin{aligned} \text{Samples:}\ & \mathbf X = (\mathbf x_1, \mathbf x_2, \cdots, \mathbf x_N)^T_{N\times p} = \begin{pmatrix} \mathbf x_1^T \ \mathbf x_2^T \ \vdots \ \mathbf x_N^T \end{pmatrix}_{N \times p} \\
\text{Samples:} \ & \mathbf Y = \begin{pmatrix} y_1 \ y_2 \ \vdots \ y_N \end{pmatrix}_{N \times 1} \\
\text{Abbreviations:}\ & \left{ (\mathbf x_i, y_i) \right}_{i=1}^N, \ \mathbf x_i \in \R^p, \ \underset{(\text{2class: } C_1,C_2)}{y_i \in {+1, -1}}\\
\text{2 Group:}\ &\mathbf x_{C_1} = { \mathbf x_i | y_i=+1} ; \quad \mathbf x_{C_2} = { \mathbf x_i | y_i=-1} \\
\text{Number:}\ & |\mathbf x_{C_1}| = N_1, \ |\mathbf x_{C_2}|=N_2, \ N_1 + N_2 = N \end{aligned} $$
Fisher
-
类内小,类间大
-
把p维降到1维,投影到某一个轴上再做分类。
在投影方向($\mathbf w$)上,类内点的坐标方差足够小,类间距离要大
投影方向就是分类超平面($\mathbf w^T \mathbf x$)的法向量。 -
记号
限定 $\| \mathbf w \| =1$
样本点$\mathbf x_i$ 在投影轴$\mathbf w$上的投影长度: $z_i = \mathbf w^T \mathbf x_i$
$$ \begin{aligned}
均值: \overline{z} =& \frac{1}{N} \sum_{i=1}^N z_i = \frac{1}{N} \sum_{i=1}^N \mathbf w^T \mathbf x_i \
协方差矩阵: S_{z} =& \frac{1}{N} \sum_{i=1}^N (z-\overline z)(z-\overline z)^T \
=& \frac{1}{N} \sum_{i=1}^N (\mathbf w^T \mathbf x_i-\overline z)(\mathbf w^T \mathbf x_i-\overline z)^T \
类C_1:\ \overline{z_1} =& \frac{1}{N_1} \sum_{i=1}^{N_1} \mathbf w^T \mathbf x_i \
S_{z_1} =&\frac{1}{N_1} \sum_{i=1}^{N_1} (\mathbf w^T \mathbf x_i-\overline{z_1})(\mathbf w^T \mathbf x_i-\overline{z_1})^T \\类C_2:\ \overline{z_2} =& \frac{1}{N_2} \sum_{i=1}^{N_1} \mathbf w^T \mathbf x_i \
S_{z_2} =& \frac{1}{N_2} \sum_{i=1}^{N_2} (\mathbf w^T \mathbf x_i-\overline{z_2})(\mathbf w^T \mathbf x_i-\overline{z_2})^T \\类内距离: & S_{z_1} + S_{z_2} \ 类间距离: & (\overline{z_1} - \overline{z_2})^2 \
目标函数: & J(\mathbf w) = \frac{(\overline{z_1} - \overline{z_2})^2}{S_{z_1} + S_{z_2}} \
分子:& \left[ \frac{1}{N_1} \sum_{i=1}^{N_1} \mathbf w^T \mathbf x_i-\frac{1}{N_2} \sum_{i=1}^{N_1} \mathbf w^T \mathbf x_i \right]^2 \
=& \left[ \mathbf w^T \left( \frac{1}{N_1} \sum_{i=1}^{N_1}\mathbf x_i-\frac{1}{N_2} \sum_{i=1}^{N_1} \mathbf x_i \right) \right]^2\\ =& \left[ \mathbf w^T (\overline{\mathbf x_{C_1}}-\overline{\mathbf x_{C_2}}) \right]^2\\ =& \mathbf w^T (\overline{\mathbf x_{C_1}}-\overline{\mathbf x_{C_2}}) (\overline{\mathbf x_{C_1}}-\overline{\mathbf x_{C_2}})^T \mathbf w^T \\S_{z_1}=& \frac{1}{N_1} \sum_{i=1}^{N_1} (\mathbf w^T \mathbf x_i - \frac{1}{N_1} \sum_{j=1}^{N_1} \mathbf w^T \mathbf x_j)(\mathbf w^T \mathbf x_i - \frac{1}{N_1} \sum_{j=1}^{N_1} \mathbf w^T \mathbf x_j)^T \
=& \frac{1}{N_1}\sum_{i=1}^{N_1} \mathbf w^T (\mathbf x_i - \overline{\mathbf x_{C_1}}) (\mathbf x_i - \overline{\mathbf x_{C_1}})^T \mathbf w\\ =& \mathbf w^T \left[ \frac{1}{N}\sum_{i=1}^{N_1} (\mathbf x_i - \overline{\mathbf x_{C_1}}) (\mathbf x_i - \overline{\mathbf x_{C_1}})^T \right] \mathbf w \\ =& \mathbf w^T S_{C_1} \mathbf w \\分母:& \mathbf w^T S_{C_1} \mathbf w + \mathbf w^T S_{C_2} \mathbf w\ =& \mathbf w^T (S_{C_1} + S_{C_2}) \mathbf w \
J(\mathbf w) =& \frac{\mathbf w^T (\overline{\mathbf x_{C_1}}-\overline{\mathbf x_{C_2}}) (\overline{\mathbf x_{C_1}}-\overline{\mathbf x_{C_2}})^T \mathbf w^T} {\mathbf w^T (S_{C_1} + S_{C_2}) \mathbf w} \ =& \frac{\mathbf w^T S_b \mathbf w}{\mathbf w^T S_{w} \mathbf w} \quad \text{($S_b$: 类间方差; $S_w$: 类内方差)} \ =& \mathbf w^T S_b \mathbf w \cdot (\mathbf w^T S_{w} \mathbf w)^{-1}
\end{aligned} $$
求: $\hat{\mathbf w} = \underset{\mathbf w}{\operatorname{arg\ max}}\ J(\mathbf w)$
4 线性判别分析 (Fisher判别分析) - 模型求解
$$ \begin{aligned} \frac{\partial J(\mathbf w)}{\partial \mathbf w} &= 0 \
2 S_b \mathbf w (\mathbf w^T S_w \mathbf w)^{-1} - \mathbf w^T S_b \mathbf w (\mathbf w^T S_w \mathbf w)^{-2} \cdot 2S_w \mathbf w &= 0 \
S_b \mathbf w (\mathbf w^T S_w \mathbf w) - \mathbf w^T S_b \mathbf w S_w \mathbf w &= 0 \
\underbrace{\mathbf w^T}{1\times p} \underset{\in \R} {\underbrace{S_b}{p\times p} \underbrace{\mathbf w}{p\times 1}} S_w \mathbf w &= S_b \mathbf w \underset{\in \R} {(\underbrace{\mathbf w^T}{1\times p} \underbrace{S_w}{p\times p} \underbrace{\mathbf w}{p\times 1})} \
S_w \mathbf w &= \frac{\mathbf w^T S_w \mathbf w}{\mathbf w^T S_b \mathbf w} S_b \mathbf w \
\mathbf w &= \frac{\mathbf w^T S_w \mathbf w}{\mathbf w^T S_b \mathbf w} S_w^{-1} \cdot S_b \cdot \mathbf w \
只关心方向:\mathbf w & \propto S_w^{-1} \cdot S_b \cdot \mathbf w \
\mathbf w & \propto S_w^{-1} \cdot (\overline{\mathbf x_{C_1}} - \overline{\mathbf x_{C_2}}) \underbrace{ (\overline{\mathbf x_{C_1}} - \overline{\mathbf x_{C_2}})^T \mathbf w }_{1\times 1 \in \R} \
\mathbf w & \propto S_w^{-1} \cdot (\overline{\mathbf x_{C_1}} - \overline{\mathbf x_{C_2}})
\end{aligned} $$
如果$S_w^-1$ 是对角矩阵,而且是各向同性,则 $S_w^{-1} \propto 单位矩阵I$,所以 $\mathbf w \propto (\overline{\mathbf x_{C_1}} - \overline{\mathbf x_{C_2}})$
5 逻辑回归 (Logistic Regression)
硬输出:0 和 1;或者 +-1
软输出:概率
9 朴素贝叶斯分类器 (Naive Bayes Classifer)
核心思想:朴素贝叶斯假设,又叫条件独立性假设,最简单的概率有向图模型
在给定类别的情况下,属性(维度)之间是相互独立的
随机变量 $y$ 是随机变量,对应 p 维自变量
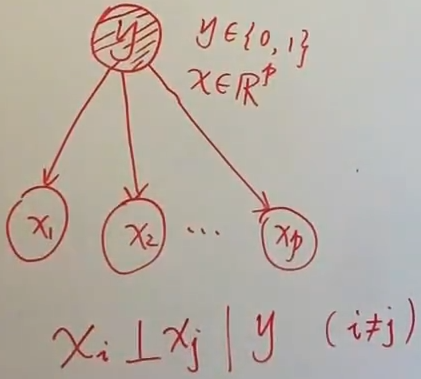
从概率图角度来看,在给定 y 的情况下,从 $x_1$ 到 $x_2$ 的路径被 y 阻断了,所以 $x_1$ 和 $x_2$ 独立。
概率表达式:
$$ P(\mathbf x | y) = \prod_{j=1}^p P(x_i | y) $$假设的动机:为了简化运算, 对于 $\mathbf x = (x_1, x_2, \cdots x_p)^T$,忽略了 $x_i$ 与 $x_j$ 之间的关系,如果p非常大,导致计算困难。
$$ P(y|x) = \frac{P(x,y)}{P(x)} = \frac{P(y)\cdot P(x|y)}{P(x)} \propto P(y) \cdot P(x | y) $$分类数据:$\{(x_i, y_i)\}_{i=1}^N, \ x_i \in \R^p, \ y_i \in {0,1}$,对于一个给定的 x,对它分类:
$$ \begin{aligned} \hat y =& \underset{y}{\operatorname{arg\ max}}\ \underset{后验}{\underline{P{(y|x)}}} \
=& \underset{y}{\operatorname{arg\ max}}\ \frac{P(x,y)}{P(x)}\\
=& \underset{y}{\operatorname{arg\ max}}\ P(y) \cdot P(x|y)
\end{aligned} $$