Table of contents
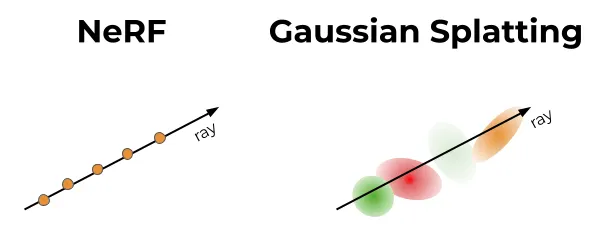
(Feature image from: A Comprehensive Overview of Gaussian Splatting - Medium - Kate Yurkova)
Surveys
-
A Survey on 3D Gaussian Splatting
(2024-01-10)
- Review papers until Jan 2024
- Not very detailed.
-
3D Gaussian as a New Vision Era: A Survey
(2024-02-13)
- Papaers in 2023.
Render Quality
Sorting
-
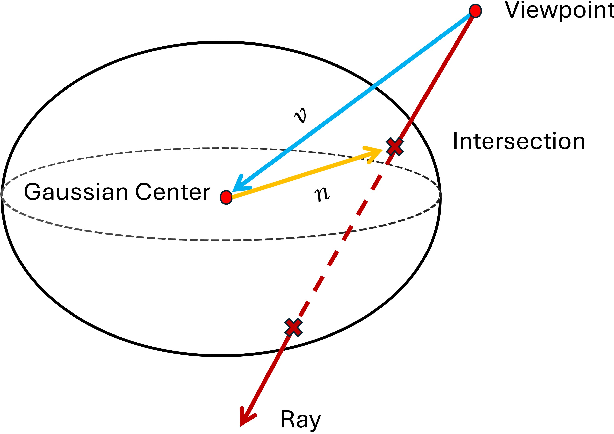
StopThePop: Sorted Gaussian Splatting for View-Consistent Real-time Rendering SIG'24 | Lukas Radl, Bernhard Kerbl, TU Graz
(Mentioned by will)
-
Task: Rending with splatting
-
Why matter?: Real-time rendering
-
Problem: 3D Gaussians are not sorted carefully for varing view directions.
-
Solution:
- Progressively find the first intersection with a 3D Gaussian on the ray
- Optical flow
-
Conclusion
-
Rethink
-
Sidenotes
-
MLP
-
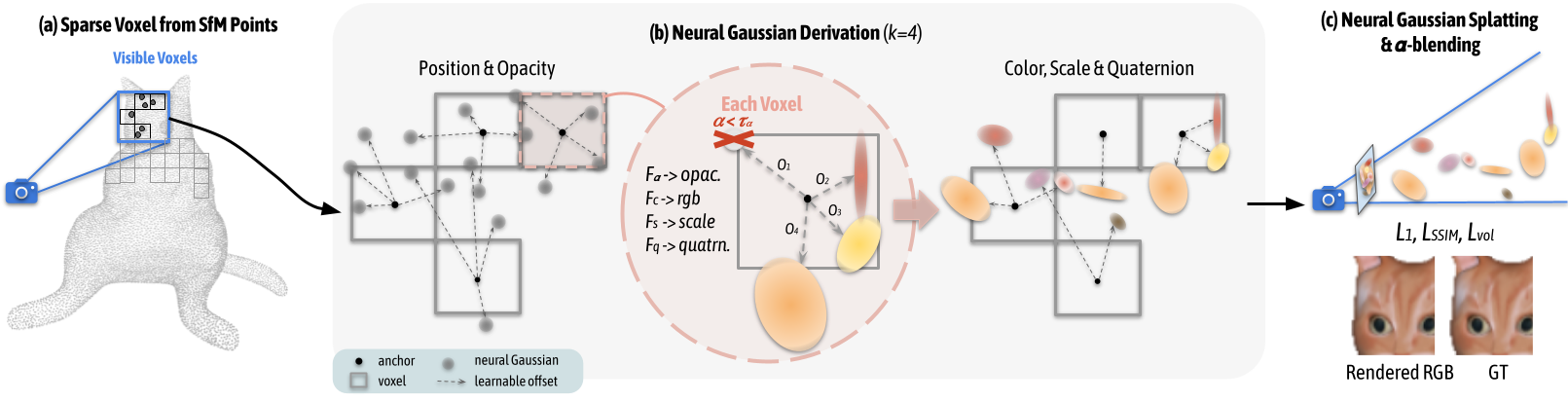
Scaffold-GS: Structured 3D Gaussians for View-Adaptive Rendering CVPR'24 | Tao Lu, Bo Dai
Code | Live: 【CVPR大佬讲paper第二期】上海AI实验室鲁涛大佬讲Scaffold-GS, GSDF, OctreeGS录制内容
(2024-05-04)
- 显隐结合
Quantum Physics
(2024-09-25)
- Jason wechat group (24/09/02):
清华大学的2DGH,从量子物理中汲取灵感,提出使用高斯-埃尔米特核作为高斯分层中的新基元, 在几何重建和新视图合成任务中的非凡性能。
Reduction
-
EAGLES: Efficient Accelerated 3D Gaussians with Lightweight EncodingS
(2023-12-08)
- Vector-Quantized to encode each Gaussian’s color and rotation attributes to a discrete vector to reduce memory usage.
-
LightGaussian: Unbounded 3D Gaussian Compression with 15x Reduction and 200+ FPS
(2023-12-09)
-
Compressed 3D Gaussian Splatting for Accelerated Novel View Synthesis
(2024-01-08)
- Sensitivity-aware clustering, quantization-aware fine-tuning, and entropy encoding.
- Learned codebooks, compress 31x
-
Compact 3D Gaussian Representation for Radiance Field
Code | Emergent | ProjPage | Joo Chan Lee
(2024-01-15)
- Reduce the number of Gaussians by learnable masking.
- use MLP to enhance the Gaussians’ color.
-
GES emergent
(2024-02-18)
- Replace Gaussian distribution with Generalized Exponential Function
PBR
-
Relightable 3D Gaussian: Real-time Point Cloud Relighting with BRDF Decomposition and Ray Tracing
(2025-04-17T23:40:22)
-
Will’s collection:
3D Gaussian Ray Tracing: Fast Tracing of Particle Scenes Moenne-Loccoz等 Radiant Foam: Real-Time Differentiable Ray Tracing Govindarajan 等 RaySplats: Ray Tracing based Gaussian Splatting Byrski 等 REdiSplats:Ray Tracing for Editable Gaussian Splatting Byrski 等 Reflective Gaussian Splatting Yao 等
Geometry
Mesh Recon
-
Trim 3D Gaussian Splatting for Accurate Geometry Representation Arxiv | Lue Fan, Zhaoxiang Zhang, CASIA
No Code | src:QChatGrp
(2024-06-12)
- Task: Geometry reconstruction
- Problem: redundant and inaccurate Gaussians
- Solution: Contribution-based trimming and small Gaussians’ scale
- Conclusion: Remove false Gaussian and preserve correct structures.
-
SuGaR: Surface-Aligned Gaussian Splatting for Efficient 3D Mesh Reconstruction and High-Quality Mesh Rendering
(2023-12-17)
- Align Gaussians with surface
-
NeuSG: Neural Implicit Surface Reconstruction with 3D Gaussian Splatting Guidance
(2024-02-20)
- Joint optimization (3DGS can’t perform gradient descent simultaneously with a neural network.)
-
QQ chat 2024-02-20: 除了 Sugar,现在还有什么新的 3DGS 提 mesh 的方法嘛
will:GaMeS,GSIR,Mesh-based Gaussian splatting for real-time large-scale deformation, 都得把 gs 退化成椭圆,目前应该只有 sugar 开了源。 还有一个 NeuSG 是 nerf+GS 联合出 mesh 的。 gs 本身的拓扑关系不强,提 mesh 还是不如 nerf,更别说比过传统方法了。
-
2D Gaussian Splatting for Geometrically Accurate Radiance Fields
(2024-04-16)
- 2D Gaussians compose of the surface.
(2024-04-24)
- Math derivation (Chinese): will-zzy/2dgs-non-official
- python imple - Colab
-
GOF
Single-View
-
Splatter Image: Ultra-Fast Single-View 3D Reconstruction
(2023-12-30)
- One image is input into a UNet to reconstruct “images” that is interpreted as parameters (opacity, RGB, Covariance, positon) of all Guassians.
- Each pixel corresponds to a Guassian.
- Cross-view transformer
- Compared with PixelNeRF
-
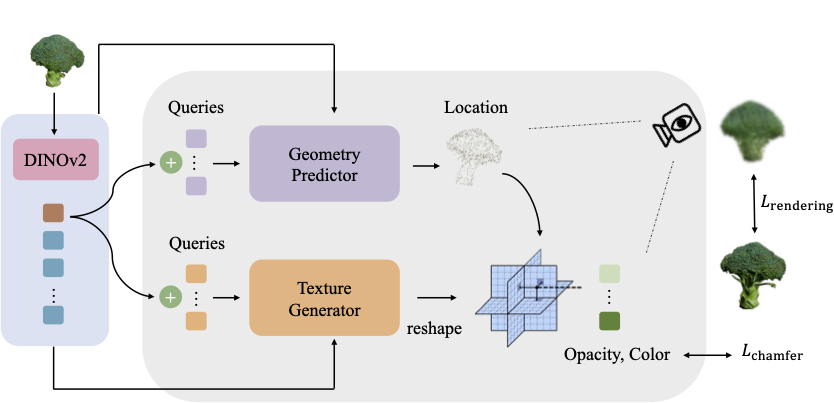
AGG: Amortized Generative 3D Gaussians for Single Image to 3D
No Code | CoolPaper | Emergent | Dejia Xu, UofTexas
(2024-01-10)
-
Comparing with optimization-based single image to 3D method, such as leveraging diffusion model, AGG obtains Gaussian-wise color and opacity from augmented image features.
-
Coarse representation: DINOv2 image features followed by 2 transformers that encode features to Gaussian locations and a tri-plane texture field.
-
The Gaussian locations + texture feature are mapped to color and opacity for each Gaussian by an MLP
- While in NeRF, MLP is used to output each point’s rgb and density.
-
In fine stage, Gaussian’s coarse color and opacity are augmented with the DINOv2 image feature, and perform super-resolution on the low-resolution feature map, which will be decoded by MLP.
(2024-04-12)
-
Triplane is a kind of implicit representation. While Gaussians is an explicit representation. 显隐结合
-
Upsampling Gaussians is a densification? (Heard from 【3D AIGC论文串讲】单视图3D重建-从单视图中预测3D模型】)
-
-
Triplane Meets Gaussian Splatting: Fast and Generalizable Single-View 3D Reconstruction with Transformers
Gradio Demo | Code | ProjPage | VAST
(2024-01-20)
-
This model (on huggingface) is trained on Objaverse-LVIS (~45K synthetic objects) only.
Is their multi-view consistency derivated from geometry prior contained in the huge dataset?
-
Image -> pre-trained ViT –> Upsample (SnowflakeNet) –> point cloud -> Tri-plane -> Gaussians’ parameters –> Splatting
-
-
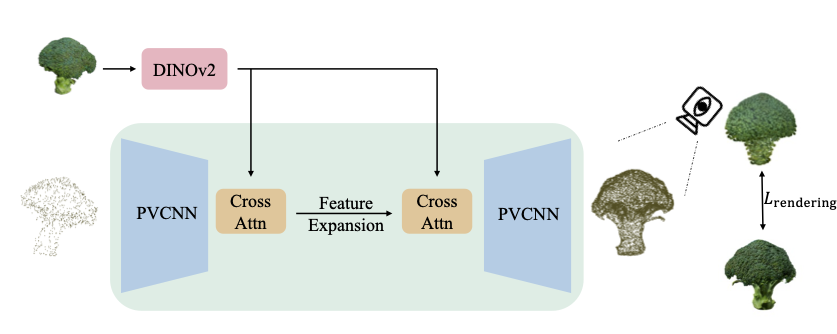
Gamba: Marry Gaussian Splatting with Mamba for single view 3D reconstruction
(2024-04-16)
- Single view -> DINO features -> Mamba-based sequential network -> 3D Gaussians
-
Touch-GS IROS'24
(2024-07-09)
- 斯坦福开源Touch-GS!视觉-触觉有监督的3D高斯泼溅-计算机视觉life
- Bayesian. How to introduce probability?
Sparse views
Mask
GaussianObject
-
GaussianObject: Just Taking Four Images to Get A High-Quality 3D Object with Gaussian Splatting
Code | Arxiv | CoolPapers | Chen Yang, Wei Shen, SJTU
(2024-02-24)
- Mask for an object. Not reconstructing a scene.
- Train a diffusion model for repairing.
(2024-04-09)
Two problems and two solutions:
-
Problem 1: Overfitting to sparse views resulting in fragmented structure.
- Visual hull of objects for structure prior to restrict Gaussian kernel within object outline.
-
Problem 2: Information missing.
- Train a 2D diffusion model, with leave-one-out training and noise-added gaussians, to predict what a corrupt rendered image should have looked like. (for arbitrary viewpoint?)
- The predicted images are used to refine 3DGS.
(2024-07-26)
-
The project: SAM has been archived. I’m confused as it’s so popular.
-
Download the “Dataset Pt. 1” of Mip-NeRF 360 (11.7G):
wget http://storage.googleapis.com/gresearch/refraw360/360_v2.zipCheck:
unzip -l 360_v2.zip
Depth Regularized
DNGaussian
-
DNGaussian: Optimizing Sparse-View 3D Gaussian Radiance Fields with Global-Local Depth Normalization ~ CVPR 2024
Code | Arxiv | Jiahe Li, Beihang

-
Supports
(2024-04-14)
Less training time and less memory footprint.
Geometry degradation can be mitigate by dpeth constraint.
Loss: hard- and soft-depth regularization; Global- and local-depth normalization.
Freeze Gaussians’ shape (covariance), and apply depth regularization to position and opacity of Gaussians.
-
Hard depth: Gaussians on the surface are the outest hull of the point cloud, they can be identified by setting a large opacity, and when rendering depth map, only their depths are revealed.
-
Small depth variation matters for 3DGS -> normalization
-
A depth map is split into patches. Normalize each patch with local patch-level depth variance, and global image-level depth variance separately.
-
Colors are predicted by a MLP.
-
-
Depth-Regularized Optimization for 3D Gaussian Splatting in Few-Shot Images
Arxiv | Jaeyoung Chung
(2023-11-30)
- Few shot but without overfitting
- Pre-trained monocular depth estimation model
Representing a 3D scene by combining numerous Gaussian splats has yielded outstanding visual quality.
NexusGS
-
Supports:
-
Problem solving
-
Implementation
-
-
Introduction:
-
Problem Analyzing
flowchart LR a("Densification") a --> b1("The number of points") a --> b2("Their position accuracy") b1 --> c1("FSGS") b2 --> c2("Depth") -
Competition
“NexusGS for Novel View Synthesis”
-
Continuous camera pose rendering
-
Metrics: PSNR, SSIM, LPIPS
-
Sparse input views
-
-
Approach
flowchart LR a("Depth map") -- constrainted --> b("Optical Flow,
Epipolar Line") b --> c("Point insert")
-
Image Features
CoherentGS
-
CoherentGS: Sparse Novel View Synthesis with Coherent 3D Gaussians
No Code | Arxiv | Avinash Paliwal, Texas A&M
(2024-04-06)

(2024-04-16)
- Regularizer: single&multiview convolution decoder + total variance loss + flow-based loss.
- Initilization: Monocular depth estimation model
pixelSplat
-
pixelSplat: 3D Gaussian Splats from Image Pairs for Scalable Generalizable 3D Reconstruction
Code | CoolPapers | David Charatan, Vincent Sitzmann
(2024-04-15)
-
2 views
-
Sample from a distribution with reparameterization trick.
-
Feed-forward: reference-image colors are fused into novel-views colors.
Feed-forward (Generalizable) methods require training on large datasets, e.g., RealEstate10K, which is also used by: IBRNet, GNT, MuRF, to accquire a general 3D scene prior.
-
-
MVSplat: Efficient 3D Gaussian Splatting from Sparse Multi-View Images
Code | Arxiv | Yuedong Chen, Monash
(2024-04-13)
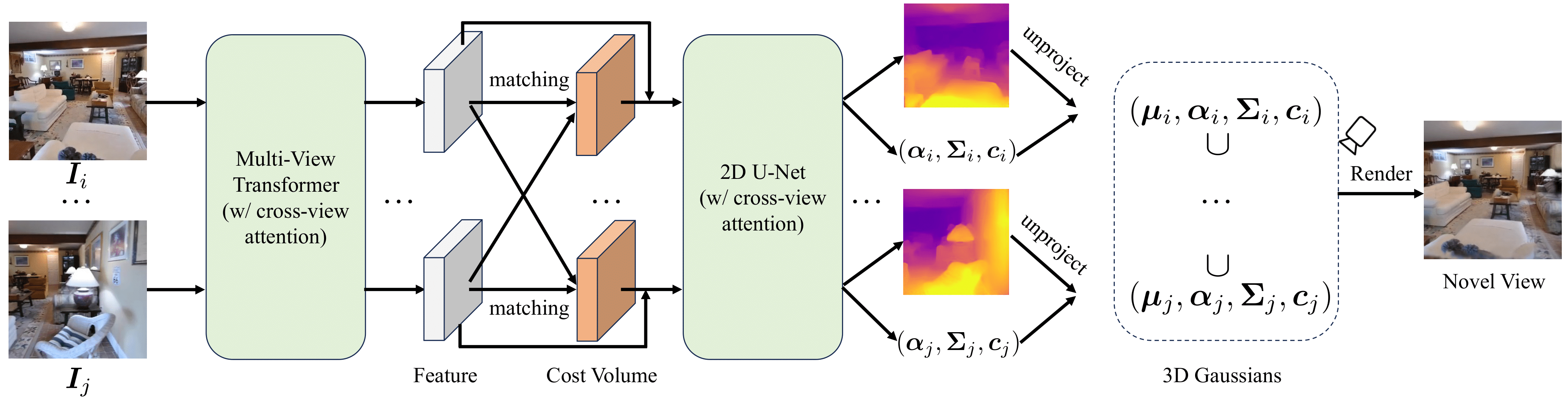
- MVSNet + 3DGS
- I guess this paper has been rejected like his last project Match-NeRF, because as Jiayuan said, “just changed a dataset”.
-
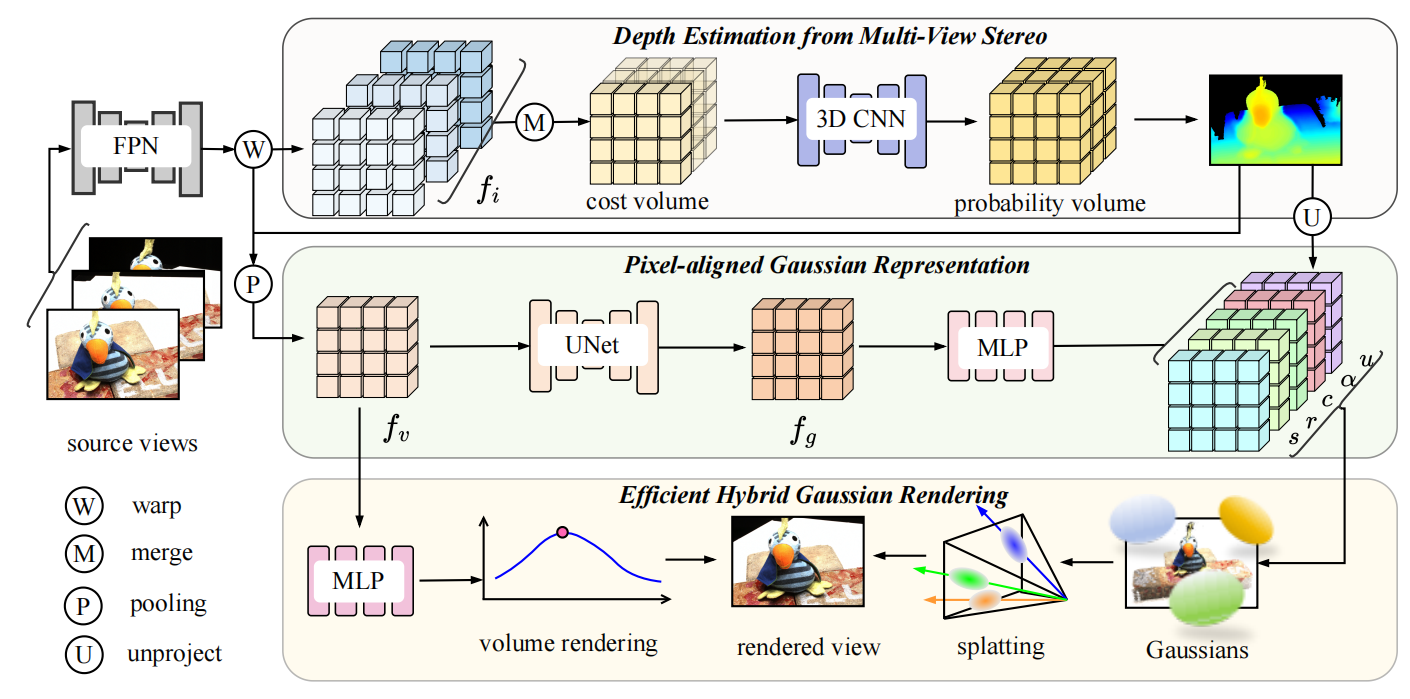
MVSGaussian: Fast Generalizable Gaussian Splatting Reconstruction from Multi-View Stereo
NoCode | Arxiv | Tianqi Liu, HUST
(2024-05-27)
-
“MVSNet” -> depth map -> pixel-aligned feature -> Gaussian parameters.
-
Frequency
-
RAIN-GS: Relaxing Accurate Initialization Constraint for 3D Gaussian Splatting
Code | Jaewoo Jung, KoreaU
(2024-04-18)

Accurate Densification
-
Revising Densification in Gaussian Splatting
(2024-04-10)
Gradient Direction
-
Pixel-GS: Density Control with Pixel-aware Gradient for 3D Gaussian Splatting
Code | Arxiv | Zheng Zhang, UoHK
(2024-05-09)
- Improve the clone and split with focus on gradients.
(2024-05-27)
- The Gaussian growth is based on the gradient. Thus, controling the growth requires to control the gradients.
- Use the number of visible views as the weights of gradients
- This reminds me the NeuRay which uses “visibility” to facilitate consistent geometry.
- Scale the gradient according to the distance to the camera to avoid the tendency that folaters exist near the camera.
-
AbsGS: Recovering Fine Details for 3D Gaussian Splatting
(2024-04-17)
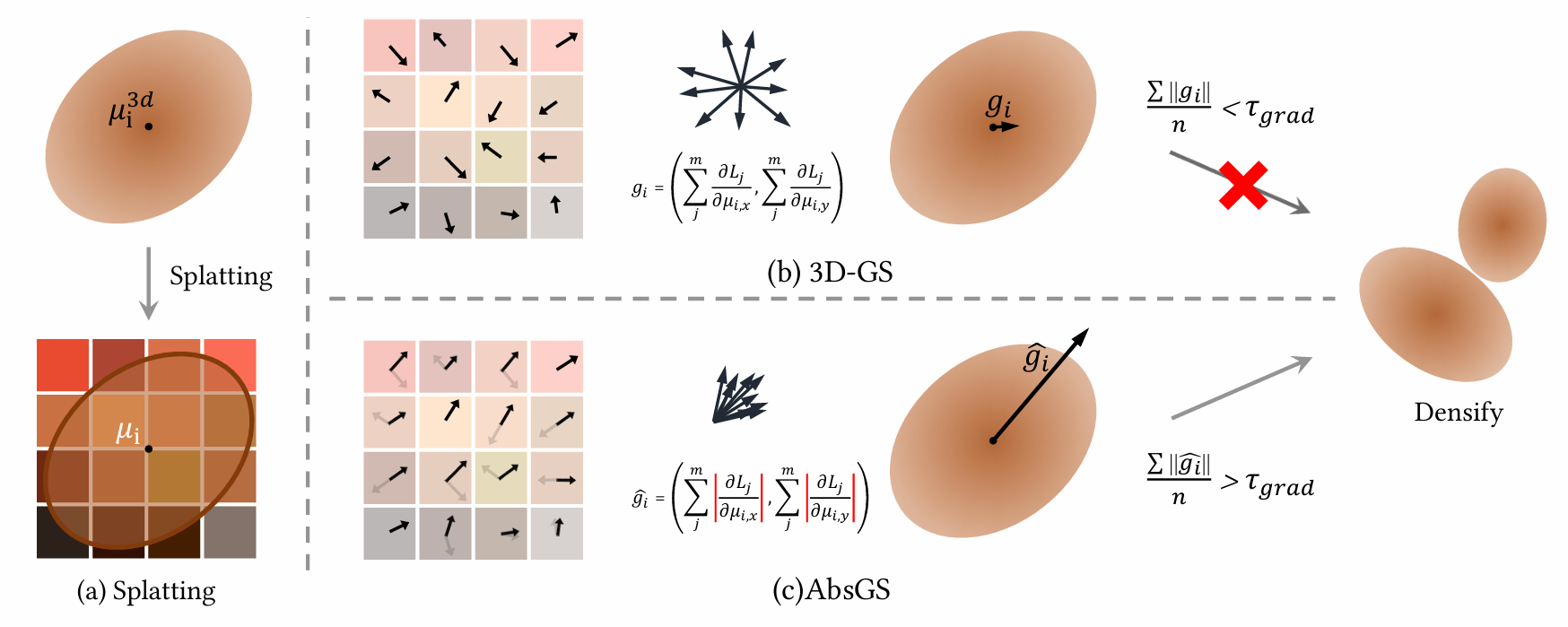
- The gradients of various Gaussians have different directions, so the gradients from covered pixels for a big Gaussian get canceled each other out. Thus, the big Gaussians won’t split
Regularization
-
GaussianPro: 3D Gaussian Splatting with Progressive Propagation
Code | Arxiv | CoolPapers
(2024-04-17)
-
Supplement Gaussians with high uncertainty from the rendered normal maps.
-
Regularization term: planer normal map loss
-
Propagate: fuse neighboring pixels’ normals
-
Accurate geometry: evaluate new Gaussians with photometric consistancy.
-
Interpolate
-
FSGS: Real-Time Few-Shot View Synthesis using Gaussian Splatting
Code | ProjPage | Zhiwen Fan, UoTexas
(2023-12-04)
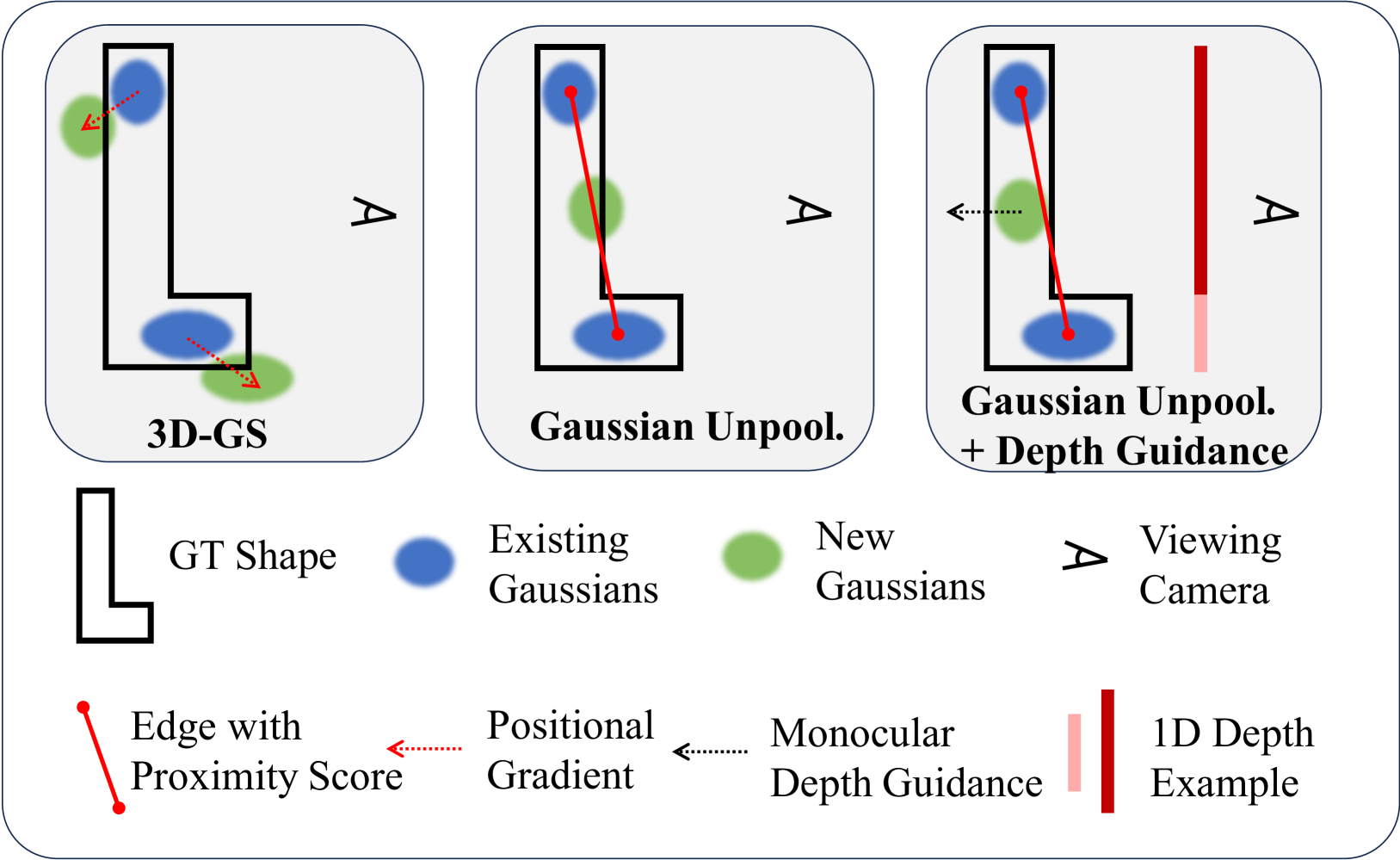
- 3 views
- Unpooling the existing Gaussians to densify the sparse point cloud resulting from sparse views
- Depth regularization from a pre-trained monocular depth estimation model.
Stochastic Process
-
References:
(2024-07-19)
-
Task:
-
Rethink:
- 感觉 densification 就是点云上采样的问题,可以单独研究上采样的问题,和 3DGS 结合就是蹭热点。 3DGS 的“本质”是:渲染快。
Attack
Poison
-
Problem Investigating
- Make a computation-intense attack on the service vendor server
::: aside
-
Supports
- f
-
Extend
-
How to densify wisely?
flowchart LR a("Wise densification") a -- reverse --> b("Suppress bad densification") b --> c("Defence computational-intense attack") -
Solutions
flowchart LR a("抵制下毒:计算成本的增加") a --> b("分类问题:判别一个 “高斯基元是否对场景重要?”") a --> c("去噪问题:消除输入图片中的(高频)噪声") -
Attack in another way?
flowchart LR a("攻击") --> b("加噪") --> c("DDPM")
-
Deblur
-
Deblurring 3D Gaussian Splatting
(2024-01-05)
- MLP “re-fuses” quaternion (covariance matrix), scaling matrix and position
SLAM
Generic 3DGS optimize a pre-generated point cloud.
-
Gaussian Splatting SLAM
(2023-12-14)
- Incrementally construct the point cloud
-
Optimize camera pose alongside point cloud via gradient descent according to the Jacobian of camera pose w.r.t. the 3D Gaussian map (screen function).
-
Confine geometry consistency via
-
Point cloud growing and pruning
-
哈工大博士分享:基于Gaussian Splatting的SLAM新发展与新论文(上)- bilibili - 计算机视觉life
-
How NeRFs and 3D Gaussian Splatting are Reshaping SLAM: a Survey
(2024-02-29)
Anti-alias
-
TRIPS: Trilinear Point Splatting for Real-Time Radiance Field Rendering
Code | Emergent | ProjPage | Linus Franke
(2024-01-14)
- screen-space image pyramid
- Light-weight MLP
Edit
-
GaussianEditor: Swift and Controllable 3D Editing with Gaussian Splatting
Code | arxiv | Yiwen Chen, Guosheng Lin
(2024-01-21)
- Integrated various papers.
- Gaussian semantic tracing ? Hierarchical Gaussian Splatting ?
Diffusion Prior
-
InFusion: Inpainting 3D Gaussians via Learning Depth Completion from Diffusion Prior
(2024-04-18)

Splatting
-
GS++: Error Analyzing and Optimal Gaussian Splatting
Arxiv | Letian Huang, NJU
(2024-02-04)
-
Minimize the Taylor approximation error in the projective transformation
-
Research aspect: point cloud storage, performance , and robustness in sparse viewpoints
-
-
360-GS: Layout-guided Panoramic Gaussian Splatting For Indoor Roaming
Arxiv | Jiayang Bai, NJU
(2024-02-04)
- Spherical surface, analogy to NeRF++
Simulation
Dynamic 3DGS
- GMix.ai Dynamic Gaussian Splatting post
-
Gaussian-Flow: 4D Reconstruction with Dynamic 3D Gaussian Particle
ProjPage |Youtian Lin, Yao Yao
(2024-02-21)
- Movement in a timestep
-
GaMeS: Mesh-Based Adapting and Modification of Gaussian Splatting
| Surfaced by Jason
(2024-02-29)
网格面的顶点对每个高斯分量进行参数化
-
SC-GS: Sparse-Controlled Gaussian Splatting for Editable Dynamic Scenes ~ CVPR 2024
ProjPage | Yi-hua Huang, Xiaojuan Qi
(2024-03-06)
- Sparse control points
- Decompose motion and appearance
- MLP predict 6DoF movement. MLP can’t reach accurate result, so it works for large-scale movement. And can it represent the multi-object interaction? like collision?
Material Points
References:
- PhysGaussian: Physics-Integrated 3D Gaussians for Generative Dynamics
-
NeuMA: Neural Material Adaptor for Visual Grounding of Intrinsic Dynamics - NeuIPS‘24
- Mentioned in Jason’s WeChat group.
(2024-03-06)
-
PhysGaussian: Physics-Integrated 3D Gaussians for Generative Dynamics
(2024-12-02)
- NeuMA r2-Nips
Depth Regularized
-
EndoGS: Deformable Endoscopic Tissues Reconstruction with Gaussian Splatting Emergent | Code
(2024-02-10)
- Depth-guided supervision for handling occulusion
Text23D
-
GSGEN: Text-to-3D using Gaussian Splatting
(2024-02-29)
No Pose
-
InstantSplat: Unbounded Sparse-view Pose-free Gaussian Splatting in 40 Seconds
ProjPage | Zhiwen Fan, UTAustin
(2024-04-01)
3DGS + DUSt3R
-
COLMAP-Free 3D Gaussian Splatting ~ CVPR 2024
No Code | Arxiv | Yang Fu, Xiaolong Wang, UCSD
(2024-04-09)
-
Given a video, each frame produces a depth map and a local Gaussian set, which will be merged into a global Gaussian set.
-
Optimize the camera pose affine transformation between 2 adjacent frams: the current frame and its previous frame.
-
Speed
NeRF Prior
-
RadSplat: Radiance Field-Informed Gaussian Splatting for Robust Real-Time Rendering with 900+ FPS
No Code | CoolPapers | Michael Niemeyer ;
(2024-04-16)
- Training 3DGS with NeRF as supervision.
Texture
-
Textured-GS: Gaussian Splatting with Spatially Defined Color and Opacity Arxiv | Zhentao Huang, Minglun Gong, UofGuelph

(2024-07-20)
-
Task: The color attribute of each 3D Gaussian
-
Why matter: Rendering surface
-
Problem: SH coeffs
-
Solution:
-
SH coeffs -> RGB,opacity
-
-
Init Point Cloud
VGGT Replace Colmap
-
Motivation
-
Colmap functionality: Generate sparse point cloud
-
VGGT functionality:
-
Implementation: VGGT + 3DGSr1-快速
- Use
Brush
- Use
::: aside
- References:
:::
-
-
Results
-
Speed up
-
Process more input images
-
VGGT Bad Pose
-
Supports:
- It is said the pose are not usable for gs r1-Dscd
::: aside
- References: {{{
VGGT + BA
-
Problem:
(2025-09-22T12:55)
-
Bundle Adjustment can improve the poses generated by VGGT
- Although the poses are not as accurate as those from COLMAP, it could be an alternative when Colmap fails. r1-Dscd
::: aside
- References: {{{
-
Number of Points
-
Problems
-
空间中的高斯基元数量是否指定?
-
有的 3dgs 实现需要指定高斯基元的数量:LichtFeld (MCMC)
-
而如果不指定数量,即允许随场景规模扩张增加的话,这会是一个潜在的安全漏洞: 计算成本攻击
-
::: aside
- References:
-