Video 6 Linear Models 9-29-2021
Outline
- Input representation
- Linear Classificatin
- Linear Regression
- Nonlinear Transformation
Review of Lecture 2
-
Learning is feasible in a probabilistic sense.
-
Red marble frequence $\nu$ in the bin is unknow → $E_{out}$ is unknown → $E_{in}$: red marble frequence in the sample $\mu$ → 最佳假设 g 使 $E_{in}$ 和 $E_{out}$ 最接近,这时Bad events 的概率为: Ein 和 Eout 相差超过 $\epsilon$ 的概率 $|E_{in}(g) - E_{out}(g)| > \epsilon$
因为 g 肯定是假设集 H 中 M 个假设的其中之一,每个都有可能:
$$ |E_{in}(h_2) - E_{out}(h_2)| > \epsilon\ \textbf{ or } |E_{in}(h_2) - E_{out}(h_2)| > \epsilon\ \textbf{ or }\ \cdots |E_{in}(h_M) - E_{out}(h_M)| > \epsilon $$
也就是 M 个假设对应的Bad events发生概率之和(各假设之间无overlapping,也就是最坏的情况,但通常各假设间有相关性),把M加到Hoeffding Inequality右侧,称为Union Bound:
$$ P[ |E_{in}(g)-E_{out}(g)|> \epsilon ] \leq 2M e^{-2 \epsilon^2 N} $$
如果样本数量N足够大,Bad event 的概率就会变小.
Linear model
-
Weights are linear related.
-
Digits pictures:
raw input: $\mathbf{x} = (x_0, x_1, \cdots, x_{256})$ (x0是bias)
linear model: $(w_0, w_1, \cdots, w_{256})$ (inputs constribution,w0=1)
-
Features: Extracted useful information (257维太高,线性模型不太行)
Intensity and symmetry $\mathbf x=(x_0, x_1, x_2)$, $x_0=$bias
linear model: $(w_0, w_1, w_2)$, $w_0=1$
-
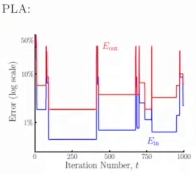
PLA is not so smart. It focus on one misclassified point and update the weight, then the in-sample error maybe better or worse. There are a lot of flactration during iterations. 错过了最小误差,就回不去了。
$E_{out}$ 是验证集上的误差,error of out-of-sample follows $E_{in}$
-
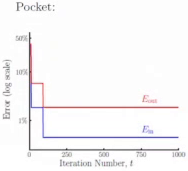
Pocket: Keep the best weights (in pocket). Replace it when finding better in the future.
Linear Classification
-
Outputs of a linear model are binary
$$ h(\mathbf x) = \operatorname{sign} \left( \sum_{i=0}^d w_i x_i \right) : { +1,-1} $$
-
+1 or -1 (Approve or Deny)
Linear Regression
-
Outputs of a linear model are real-valued
$$ h(\mathbf x) = \sum_{i=0}^d w_i x_i = \mathbf{w}^T \mathbf{x} \quad \text{(w0 for bias x0)} $$
-
不再传给sign函数,判断$\pm 1$分类
-
data set: $\rm (\pmb x_1, y_1), (\pmb x_2, y_2),\cdots (\pmb x_N, y_N)$
用线性回归去复制 data set,然后预测未来x的y。
-
用假设 $h(\mathbf x) = \mathbf w^T \mathbf x$ 近似未知目标函数 $f(\mathbf x)$:
$$ \left(h(\mathbf x) - f(\mathbf x) \right)^2 $$
(Square error will make solving linear regression problem easily one-shot.)
In-sample error:
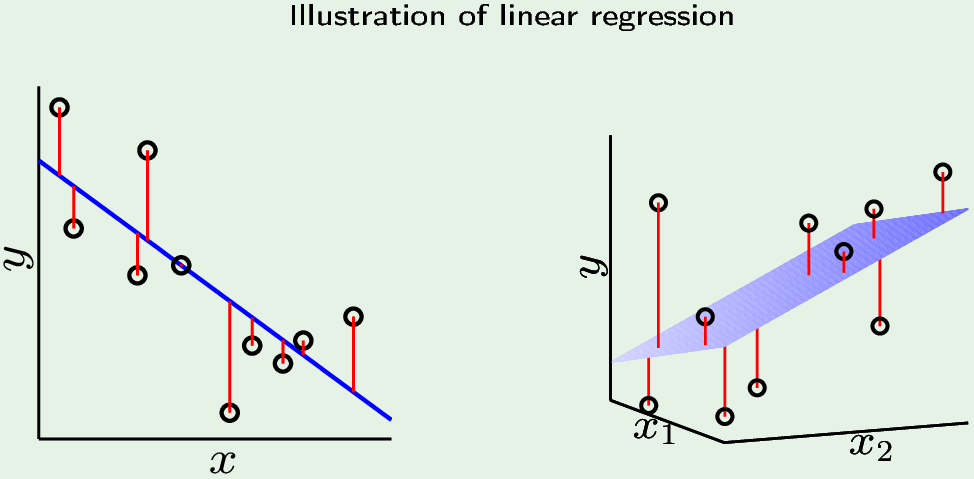
一个特征是点到直线距离,两个特征是点到超平面距离。
$$ E_{in}(h) = \frac{1}{N} \sum_{n=1}^N (h(\mathbf x_n) - y_n)^2 $$
In-sample error 是权重 $\mathbf w$ 的函数 ($\mathbf x$和y都是固定的训练样本,只有$\mathbf w$是变量),线性回归的目标是找到使 In-sample error 最小的$\mathbf w$:
$$ \begin{aligned} E_{in}(\mathbf w) &= \frac{1}{N} \sum_{n=1}^N (\mathbf w^T \mathbf x_n - y_n)^2 \\ &= \frac{1}{N} | \mathbf{Xw} - \mathbf y |^2 \end{aligned} $$
(把求和变成矩阵,方便求导找最值)其中:
$$ \mathbf X= \begin{bmatrix} \mathbf x_1^T \\ \mathbf x_2^T \\ \vdots \\ \mathbf x_N^T \end{bmatrix}, \mathbf y= \begin{bmatrix} y_1^T \\ y_2^T \\ \vdots \\ y_N^T \end{bmatrix} $$
-
求 $E_{in}$ 的最小值:对 $\mathbf w$ 求导,并令其等于0:
$$ \begin{aligned} E_{in}’(\mathbf w) &= 0 \\ \frac{2}{N} \mathbf X^T (\mathbf {Xw} -y) &= 0 \\ \mathbf X^T \mathbf {Xw} &= \mathbf X^T y \\ \mathbf w &= \mathbf X^{\dagger} y & \text{where } \mathbf X^\dagger = (\bf X^T X)^{-1} X^T \end{aligned} $$
Perceptron is more similar to the learning process that you’re just trying to learn something from one iteration to the other iteration. Here it’s not iterative. Linear regression is a kind of one-shot learner that learns one iteration.
$\mathbf X^\dagger$ is the pseudo-inverse of $\mathbf X$:
$$ \underbrace{ \begin{pmatrix} \underbrace{ \begin{bmatrix} x_{00} & x_{10} & \cdots x_{N0} \ x_{01} & x_{11} & \cdots x_{N1} \ \vdots \ x_{0d} & x_{1d} & \cdots x_{Nd} \end{bmatrix} }_{(d+1)\times N}
\underbrace{ \begin{bmatrix} x_{00} & x_{01} & \cdots x_{0d} \ x_{10} & x_{11} & \cdots x_{1d} \ \vdots \ x_{N0} & x_{N1} & \cdots x_{Nd} \end{bmatrix} }_{N\times (d+1)}
\end{pmatrix}^{-1}
\underbrace{ \begin{bmatrix} x_{00} & x_{10} & \cdots x_{N0} \ x_{01} & x_{11} & \cdots x_{N1} \ \vdots \ x_{0d} & x_{1d} & \cdots x_{Nd} \end{bmatrix} }{(d+1)\times N} }{(d+1)\times N} $$
$\mathbf w = \mathbf X^\dagger y = \underbrace{[w_0\ w_1\ \cdots w_{d}]}_{(d+1)\times 1}$
Linear regression algorithm
-
构建 the data matrix $\mathbf X$ and the vector y from the data set $(\mathbf X_1, y_1), \cdots, (\mathbf X_N, y_N)$
$$ \mathbf X = \begin{bmatrix} \cdots \mathbf x_1^T \cdots \ \cdots \mathbf x_2^T \cdots \ \vdots \ \cdots \mathbf x_N^T \cdots \ \end{bmatrix} , y= \begin{bmatrix} y_1^T \ y_2^T \ \vdots \ y_N^T \end{bmatrix} $$
-
计算伪逆矩阵 $\mathbf X^\dagger = (\bf X^T X)^{-1} X^T$
-
返回 $\mathbf w = \mathbf X^\dagger y$
Linear regression for classification
- 利用线性回归一次性解出 $\mathbf w$,将其作为perception的初值,再迭代。
-
- Linear regression 学习一个实值函数 $y=f(x)$
- 二分类函数的 $\pm 1$ 也是实数
- 使用linear regression “训练”(学习)到最佳$\mathbf w$(使$E_{in}$(平方误差)最小)$\mathbf w^T \mathbf x_n \approx y_n = \pm 1$
- 将这个$\mathbf w$ 作为perceptron的初始值开始训练,随机初始化w可能迭代很多次也不会收敛。
Linear regression boundary
- 线性回归 one-shot 解出的w 对应一条直线.
- 回归是为了使整体的 $E_{in}$ (点到超平面的距离) 最小,当两类数据分布不均匀时,超平面会偏移“分类边界”。in-smaple Error (平方误差)不是Classification error。再用 perception 优化分类结果。
Video 9
Nonlinear transformation
-
Use $\Phi$ to transform the non-linear input space $\mathcal X$ to a linear space $\mathcal Z$ (where there is linear relation between $\mathbf w$s)
Any point $\mathbf x \overset{\Phi}{\rightarrow} \mathbf z$ preserves the linearity, so that points are linearly separable.
-
$g(\mathbf x) = \tilde g(\Phi(\mathbf x)) = \rm sign(\tilde \mathbf{w}^T \Phi(\mathbf x))$
-
Transformation:
$$ \begin{aligned} \mathbf x = (x_0, x_1, \cdots, x_d)\ &\overset{\Phi}{\rightarrow} \mathbf z = (z_0, z_1, \cdots, z_{\tilde d}) & \text{维度可以不同,$x_0$是bias} \
\mathbf{x_1, x_2, \cdots, x_N}\ &\overset{\Phi}{\rightarrow} \mathbf{z_1, z_2, \cdots, z_N} & \text{n个点都做变换}\
y_1, y_2, \cdots, y_N \ &\overset{\Phi}{\rightarrow} y_1, y_2, \cdots, y_N & \text{标签不变} \
\text{No weights in } \mathcal X & \qquad \widetilde \mathbf w =(w_0, w_1,\cdots, w_{\tilde d}) & \text{z空间中建立线性模型} \
g(\mathbf x) &= \rm sign (\tilde \mathbf w^T \Phi(\mathbf x)) \end{aligned} $$