(2024-05-16)
-
Homography 是把一张照片变到另一个视角下
ex: 桌子上放着一张 照片,从不同视角去看,除了正视,从其他视角看,看到照片里的内容就变形了。
- 注意:必须是照片,不要关注照片里的 3D 物体。 Homography 就是描述从不同角度看 照片,看到的照片的样子。 不论你从哪看,它就只是一个平面,所以斜着看照片,上面的内容就会拉伸收缩:比如上面的字放大缩小,一个正方形变成梯形。 变换视角时,不会出现物体间的遮挡,因为只是在分析一个 平面。
Homography warps two images to a common plane, or maps a pixel from a camera plane to another camera plane.
-
A pixel can be mapped to another camera because the 2 pixels are the projections of a common 3D point.
-
Homography warps the images captured from different angles, observing a common plane at a certain depth, to a unified viewpoint for stitching or other applications.
-
A homography corresponds to only one depth. If the image doesn’t only capture a plane at a certain depth, the part with a deviated depth will be distorted in the warped image. Thus, solving homographies requires specifying depth.
-
Homography relation is built based on the pose transformation between two cameras, and a depth embodied by a co-observed point or a co-observed plane. Or it can be sovled from 4 pairs of matched pixels.
-
Specifically, two cameras are connected via the 2 camera-space coordinates conversion for a depth-known co-observed 3D point.
-
The conversion can be represented by two camera’s poses in the world space, or the direct transformation from one camera to the other.
-
The depth of the co-observed 3D point can be given by specifying either the z-coordinate directly or a plane (𝐧,d) indirectly.
-
-
(2023-12-19) Two scenarios for homography: stitching images based on a co-observed plane, and transferring viewpoint for a plane surface. They both rely on the observed plane.
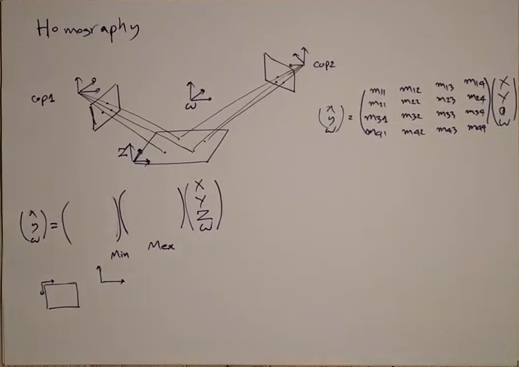
Two Cameras
The homography matrix is solved based on matching points in a pair of images.
$$ 𝐲₁ = 𝐏₁ ⋅ 𝐐 \\ 𝐲₂ = 𝐏₂ ⋅ 𝐐 \\ 𝐲₂ = 𝐏₂ ⋅ 𝐏₁⁻¹ * 𝐲₁ $$
-
𝐏 is the projecting operation that converts a world coordinates of a point 𝐱 to pixel coordinates 𝐲.
$𝐏 = 𝐊[𝐑|𝐭]$ and $𝐏⁻¹ = [𝐑|𝐭]⁻¹𝐊⁻¹$
-
𝐏₂ ⋅ 𝐏₁⁻¹ is the homography matrix.
-
Besides 𝐊[𝐑|𝐭], the z-coordinate of covisible point 𝐐 (or the “distance from camera center to plane” d) is necessary.
Since the inverse intrisics $𝐊⁻¹ ⋅(u,v,1)ᵀ$ solely can’t determine a unique 3D point as z has been canceled when $(u,v,1)ᵀ=\frac{1}{z}⋅𝐊⁻¹ ⋅ (x,y,z)ᵀ$, the z must be specified at first. 5
$$ (x,y,z)ᵀ = 𝐊⁻¹ ⋅z ⋅(u,v,1)ᵀ $$
If assuming camera’s z-axis is perpendicular to the observed plane, then z is indeed $d$. Thus, the z-retained coordinates of the pixel 𝐲₁ is (ud,vd,d), such that $𝐊⁻¹ ⋅d⋅(u,v,1)ᵀ$ is a unique 3D point in the camera space.
-
Recall the NeRF’s sampling points (
get_rays_np): meshgrid as pixel coordinates → divided by focal (with z=1) to be in camera space → @c2w to be in world space → z vals samplingThus $𝐊⁻¹ ⋅(u,v,1)ᵀ$ only determines the viewdir, not a 3D point.
Then, roll back it to world space and project to the other camera to get the pixel 𝐲₂.
$$ 𝐲₂ = 𝐊₂[^{𝐑₂ \quad 𝐭₂}_{0 \quad 1}] [^{𝐑₁ \quad 𝐭₁}_{0 \quad 1}]⁻¹𝐊₁⁻¹ ⋅d⋅𝐲₁ $$
Overview: Plane1 → camera1 → world space → camera 2 → plane 2
-
-
However, if either 𝐐’s $z$ (or the distance $d$), or poses of two cameras is unknown, the 3x3 homography matrix can be solved from 4 pairs of matching pixels.
(2023-12-04)
Basis Changes
Refer to Planar homographies - Department of Computer Science, University of Toronto
In a “meta space” holding two cameras, for example the world space, a ray emitted from the world origin passed through 2 world points 𝐦, 𝐧 locating on 2 planes separately.
-
$\vec{a₀}$ and $\vec{b₀}$ are the normal vector of two planes.
-
$\vec{a₁}$, $\vec{a₂}$ are orthogonal, so they form a basis of the plane, same as $\vec{b₁}$, $\vec{b₂}$.
Thus, the world point 𝐦 on the plane can be represented by its planar basis as 𝐩 = (p₁,p₂,1) :
$$ 𝐦 = 𝐚₁ p₁ + 𝐚₂ p₂ + 𝐚₀ = \begin{pmatrix}𝐚₁ & 𝐚₂ & 𝐚₀\end{pmatrix} \begin{pmatrix} p₁ \\ p₂ \\ 1 \end{pmatrix} = 𝐀 \begin{pmatrix} p₁ \\ p₂ \\ 1 \end{pmatrix} $$
-
Specifically, 𝐚₀, 𝐚₁, 𝐚₂ make up the camera space.
Since each column in A is the camera (source) space basis axis seen from the world (original) space, 𝐀 contains c2w, and $𝐀 = [𝐑|𝐭]ₘ⁻¹𝐊ₘ⁻¹$
Similarly, the point 𝐧 represented by the basis of its plane is 𝐪 = (q₁,q₂,1):
$$𝐧 = \begin{pmatrix}𝐛₁ & 𝐛₂ & 𝐛₀\end{pmatrix} \begin{pmatrix} q₁ \\ q₂ \\ 1 \end{pmatrix} = 𝐁 \begin{pmatrix} q₁ \\ q₂ \\ 1 \end{pmatrix} $$
- where 𝐁 can be interpreted as $𝐁= [𝐑|𝐭]ₙ⁻¹𝐊ₙ⁻¹$
-
-
Because the two world points are on the common line, and they satisfy the perspective projection centered at the world origin, so the only difference between them is a scaling factor.
$$𝐦 = α 𝐧$$
- α is a scalar that depends on 𝐧. And eventually, on 𝐪. So α is a function of 𝐪, i.e., α(𝐪).
Substituting their coordinates 𝐩 and 𝐪:
$$ \begin{aligned} 𝐀𝐩 = α(𝐪) ⋅𝐁⋅𝐪 \\ 𝐩 = α(𝐪) ⋅𝐀⁻¹⋅𝐁⋅𝐪 \end{aligned} $$
- A is invertible because its 3 rows (base vectors) are independent and nonzero as the plane doesn’t cross zero.
-
If 𝐦 and 𝐧 are overlapped, i.e., the same point, which is just observed from different angles, the scale factor α = 1.
(2023-12-05)
Transfer Camera
Source article: Pinhole Camera: Homography - 拾人牙慧 - 痞客邦
-
Homography transfers a pixel on cam1 to another camera’s film.
-
A homography can be solved if the rotation and translation from one camera to the other and the co-observed plane (𝐧,d) is defined under the original camera space.
In other words, the camera-1’s space is regraded as the world space. Thus, the extrinsics of cam1 is [𝐈|0], and cam2’s extrinsics is [𝐑|𝐭].
-
Note: In this setting, the co-observed 3D point 𝐐’s coordinates aren’t given, so the plane {𝐧,d} is necessary to derive the crucial z-coordinate of 𝐐.
-
Supp: A plane in a 3D space can be defined by its normal vector 𝐧 (a,b,c) and a point 𝐐 (x,y,z) located on it as: $𝐧𝐐 = 0$ (12.5: Equations of Lines and Planes in Space).
$$ 𝐧⋅𝐐 = (a,b,c) (x-x₀, y-y₀, z-z₀) \\ = ax-ax₀+by-by₀+cz-cz₀ = 0 $$
- where (x₀,y₀,z₀) is the “origin”.
-
If the plane is displaced from the origin along its normal vector by distance $d$, the plane is $𝐧𝐐-d=0$. (Plane Equation - Song Ho)
$$ 𝐧⋅𝐐 = (a,b,c) (x-da-x₀, y-db-y₀, z-dc-z₀) \\ = ax-ax₀+by-by₀+cz-cz₀ -d = 0 $$
Thus, 𝐐 can be determined by 𝐧 and d.
The normal vector 𝐧 uses coordinates in the camera-1, as it’s used to locate the point 𝐐 observed by camera-1.
Within the camera-1 space, the distance from the camera center 𝐂₁ to the plane can be expressed as the inner product of $𝐐$ (or $𝐂₁𝐐$) and $𝐧$
$$ d = 𝐧ᵀ⋅𝐐 = 1⋅|𝐐|⋅cosθ $$
-
If 𝐧 points towards the side with the camera-1, then θ is larger than 90°, so d is negative. Thus, a minus sign will be added.
In MVSNet, all preset depth planes are parallel to the reference camera, so 𝐧 represented in the reference camera space is $(0,0,-1)ᵀ$, and $𝐧 𝐑_{ref}$ (i.e.,
fronto_direction) is the opposite z-axis of $𝐑_{ref}$ (extrinsics) in the world space.
If $d$ and $𝐧$ are known, the coordinate of 𝐐 under camera-1 space can be written as:
If $d$ and 𝐧 are known, although there is $𝐐 = \frac{d}{𝐧ᵀ}$, the 𝐐=(Qx,Qy,Qz)ᵀ can’t be determined uniquely based on it alone. Because there are 3 unkonwns with only 1 constraint, there is infinitely many solutions.
However, the following equation can be used:
$$ 1 = - \frac{𝐧ᵀ⋅𝐐}{d} $$
Assume the conversion between two cameras is: $$𝐐’ = 𝐑𝐐 + 𝐭$$
-
𝐑 and 𝐭 transform the coordinates in camera-1 to coordinates in camera-2, i.e., the camera-1 is transformed to camera-2.
-
𝐐’ is the coordinates of the covisible point in the camera-2’s space. With it, the target pixel on camera-2 is: $𝐊’𝐐’$.
By substituting the above equation of 1, 𝐐’ can be expressed with plane’s parameters:
$$ 𝐐’ = 𝐑𝐐 + 𝐭⋅1 = (𝐑 -𝐭 \frac{𝐧ᵀ}{d})𝐐 $$
-
Essentially, the z-coordinate of 𝐐 is determined by the plane uniquely.
-
Thus, 𝐐 can be given by specifying z directly or a plane (𝐧,d) equivalently.
And 𝐐’ can be represented by two cameras’ poses or the transformation from one camera to the other.
-
(2024-05-30) The point 𝐐 is written as a form with a plane, because the object described by homography is a plane.
Suppose two cameras have different intrinsics 𝐊 and 𝐊’, so their projection pixels are 𝐩 and 𝐪 respectively:
$$ 𝐩 = 𝐊𝐐 \quad \text{and} \quad 𝐪 = 𝐊’ 𝐐’ $$
Substituting 𝐐’, the 𝐪 will be derived from 𝐩:
$$ 𝐪 = 𝐊’ (𝐑-𝐭 \frac{𝐧ᵀ}{d})𝐐 = 𝐊’ (𝐑-𝐭 \frac{𝐧ᵀ}{d}) 𝐊⁻¹𝐩 $$
Hence, the homography from 𝐩 to 𝐪 is: $$ 𝐇 = 𝐊’ (𝐑-𝐭 \frac{𝐧ᵀ}{d}) 𝐊⁻¹ $$
(2024-05-10)
-
The way of introducing plane parameters in this homography formula is representing the coordinates of 𝐐 in camera1 by plane normal and d.
Although $\frac{d}{𝐧ᵀ}$ is not enough to determine the 𝐐, the transformation [𝐑|𝐭] serves as another constraint to ensure that the relationship between 𝐐’ and 𝐐 holds.
(2023-12-06)
$𝐊⁻¹ ⋅(u,v,1)ᵀ$ can’t restore a 3D point uniquely because z has been absorbed into u,v. (i.e., z is unknown in $\rm 𝐐 = 𝐊⁻¹⋅ z⋅ (u,v,1)ᵀ$) Instead, it represents a line of points with various z, corresponding to the epipolar line on the other camera film.5
Therefore, the distance from a camera to the plane is used to specify the point on a certain plane, which will be transformed first to the other camera space and then projected perspectively onto camera film.
$$ \begin{aligned} 𝐐 &= -\frac{d}{𝐧ᵀ} & \text{unique point} \\ 𝐐’ &= 𝐑 𝐐 + 𝐭 & \text{Another camera space} \\ 𝐪 &= 𝐊 𝐐’ = 𝐊(𝐑 𝐐 +𝐭) & \text{perspective project} \\ &= 𝐊 (𝐑 -𝐭 \frac{𝐧ᵀ}{d}) 𝐐 \\ &= 𝐊 (𝐑 -𝐭 \frac{𝐧ᵀ}{d}) 𝐊^{-1} 𝐩 \end{aligned} $$
In this way, the projection on a camera film is mapped to another camera’s film.
Note: the pixel coordinates on the two films are not the same.
(2023-12-07)
Generalize H
Source article: 5. Multi-View Stereo中的平面扫描(plane sweep) - ewrfcas的文章 - 知乎
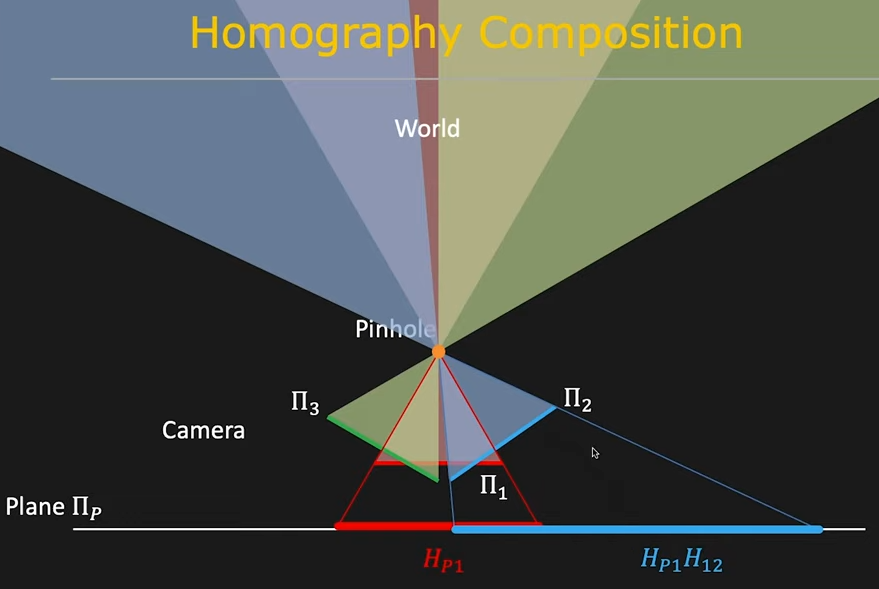
The generalized homography describes the pixel mapping from the reference plane 𝐂₁ to the plane of an arbitrary camera 𝐂ᵢ.
To apply the above derived expression 𝐇, the camera Ref-1 should always be the “world space”, and the target plane is various source camera-i.
Thus, the coordinates 𝐐’ in a source camera-i space is transformed from 𝐐 in the Ref-1 camera space as:
$$ 𝐐’ =\begin{bmatrix} 𝐑ᵢ & 𝐭ᵢ \\ 0 & 1 \end{bmatrix} \begin{bmatrix} 𝐑₁ & 𝐭₁ \\ 0 & 1 \end{bmatrix}^{-1} 𝐐 $$
The matrices product can be simplified as:
$$ \begin{bmatrix} 𝐑ᵢ & 𝐭ᵢ \\ 0 & 1 \end{bmatrix} \begin{bmatrix} 𝐑₁ & 𝐭₁ \\ 0 & 1 \end{bmatrix}^{-1} = \begin{bmatrix} 𝐑ᵢ & 𝐭ᵢ \\ 0 & 1 \end{bmatrix} \frac{1}{𝐑₁}\begin{bmatrix} 1 & -𝐭₁ \\ 0 & 𝐑₁ \end{bmatrix} = \\ \begin{bmatrix} 𝐑ᵢ & 𝐭ᵢ \\ 0 & 1 \end{bmatrix} \begin{bmatrix}𝐑₁⁻¹ & -𝐑₁⁻¹𝐭₁ \\ 0 & 1 \end{bmatrix} = \begin{bmatrix} 𝐑ᵢ𝐑₁⁻¹ & -𝐑ᵢ𝐑₁⁻¹𝐭₁+𝐭ᵢ \\ 0 & 1 \end{bmatrix} \\ $$
Therefore, the generalized relation between 𝐐’ and 𝐐 is:
$$ 𝐐’ = \tilde{𝐑}𝐐+ \tilde{𝐭} = 𝐑ᵢ𝐑₁⁻¹ 𝐐 + (-𝐑ᵢ𝐑₁⁻¹𝐭₁+𝐭ᵢ)$$
Substituting $\tilde{𝐑}$ and $\tilde{𝐭}$ into the planar homography:
$$ 𝐪 =𝐊ᵢ (𝐑ᵢ𝐑₁⁻¹ - \frac{(-𝐑ᵢ𝐑₁⁻¹𝐭₁+𝐭ᵢ) 𝐧ᵀ}{d} ) 𝐊₁⁻¹𝐩 $$
Rearrange it to align with the MVSNet paper:
$$ 𝐪 =𝐊ᵢ 𝐑ᵢ(𝐑₁⁻¹ - \frac{(-𝐑₁⁻¹𝐭₁+𝐑ᵢ⁻¹𝐭ᵢ)𝐧ᵀ}{d}) 𝐊₁⁻¹𝐩 \\ = 𝐊ᵢ 𝐑ᵢ ( 𝐈 - \frac{(-𝐑₁⁻¹𝐭₁+𝐑ᵢ⁻¹𝐭ᵢ) 𝐧ᵀ 𝐑₁}{d})𝐑₁⁻¹ 𝐊₁⁻¹𝐩 $$
The eq. (1) in MVSNet was wrong: $𝐇_i(d) = 𝐊ᵢ 𝐑ᵢ ( 𝐈 - \frac{(𝐭₁-𝐭ᵢ) 𝐧ᵀ}{d})𝐑₁ᵀ 𝐊₁ᵀ$, (issue #77)
- $𝐊₁⁻¹ \neq 𝐊₁ᵀ$ since 𝐊 may not be an orthogonal matrix.
- 𝐑ᵢ⁻¹ and 𝐑₁ can’t be cancled.
Corresponding to MVSNet-TF code,
c_left is $-𝐑₁⁻¹𝐭₁$; c_right is $-𝐑ᵢ⁻¹𝐭ᵢ$;
c_relative is $-(-𝐑₁⁻¹𝐭₁+𝐑ᵢ⁻¹𝐭ᵢ)$
fronto_direction is $-𝐧ᵀ 𝐑₁$, which is R_left[2,:].
Therefore, temp_vec = tf.matmul(c_relative, fronto_direction) is $(-𝐑₁⁻¹𝐭₁+𝐑ᵢ⁻¹𝐭ᵢ) 𝐧ᵀ 𝐑₁$.
Warp An Image
-
(2023-12-19) Homography warps a non-rectangle to a rectangle.

(2023-02-08)
Homography matrix warps an image to another plane. In the application of image stitching, multiple images are warped to a unified plane.
The images have to be observing the common plane.
-
It works for stitching planar panoramas because the scene is far from the camera.
-
(2023-12-17) In other words, co-planar points remain co-planar after a homography transformation (matrix). For example, a point on a plane that in image-1 remains located on the plane viewed by image-2.
Two pairs of matched points will perform the same transformation: $$\begin{cases}p_1 = H p_2 \\ q_1 = H q_2 \end{cases}$$
Put differently, “a plane remains a plane in another view”, while the portion that is not on the plane will be warped.
-
R,T can be solved from H and K.
-
Demo: Warp the image to simulate the scene seen from another displaced camera (Aerial View). Refer to: OTC4 Homography說明以及小實驗-AI葵
Select 10 points to form a plane, which remains a plane in another view after transformion.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26import cv2 import numpy as np import matplotlib.pyplot as plt %matplotlib inline img1 = cv2.imread("rot1.png") pts1 = [(24, 124), (49, 124), (98, 124), (104, 124), (120, 124), (18, 146), (37, 146), (65, 146), (102, 146), (133, 146)] for pt in pts1: cv2.circle(img1, pt, 0, (0, 0, 255)) plt.figure(figsize=(20,10)) plt.imshow(img1[:,:, ::-1]) img2 = cv2.imread("rot2.png") pts2 = [(45, 116), (64, 120), (110, 127), (118, 128), (135, 131), (31, 135), (46, 137), (69, 143), (105, 150), (140, 158)] src_points = np.array(pts1, dtype=np.float32).reshape(-1,1,2) dst_points = np.array(pts2, dtype=np.float32).reshape(-1,1,2) Homography, mask = cv2.findHomography(src_points, dst_points, 0, 0.0) # (3,3) # warp img1 to the view of img2 warped1 = cv2.warpPerspective(img1, Homography, (img1.shape[1], img1.shape[0])) plt.figure(figsize=(20,10)) plt.imshow(warped1[:,:,::-1]) # reverse plt.imshow(img2[:,:,::-1], alpha=0.6) # overlapBird’s-Eye View:
1 2 3 4 5src_trapezoid = np.float32([[1, 128], [47, 91], [120, 91], [157, 128]]) dst_rectangle = np.float32([[64, 104], [64, 64], [104, 64], [104, 104]]) homoMatrix = cv2.getPerspectiveTransform(src_trapezoid, dst_rectangle) warped = cv2.warpPerspective(img, homoMatrix,(img.shape[1], img.shape[0]))The image got transformed by the homography to deform the trapezoidal road lane to a rectangle displaying on the image by changing the camera pose to looking down:
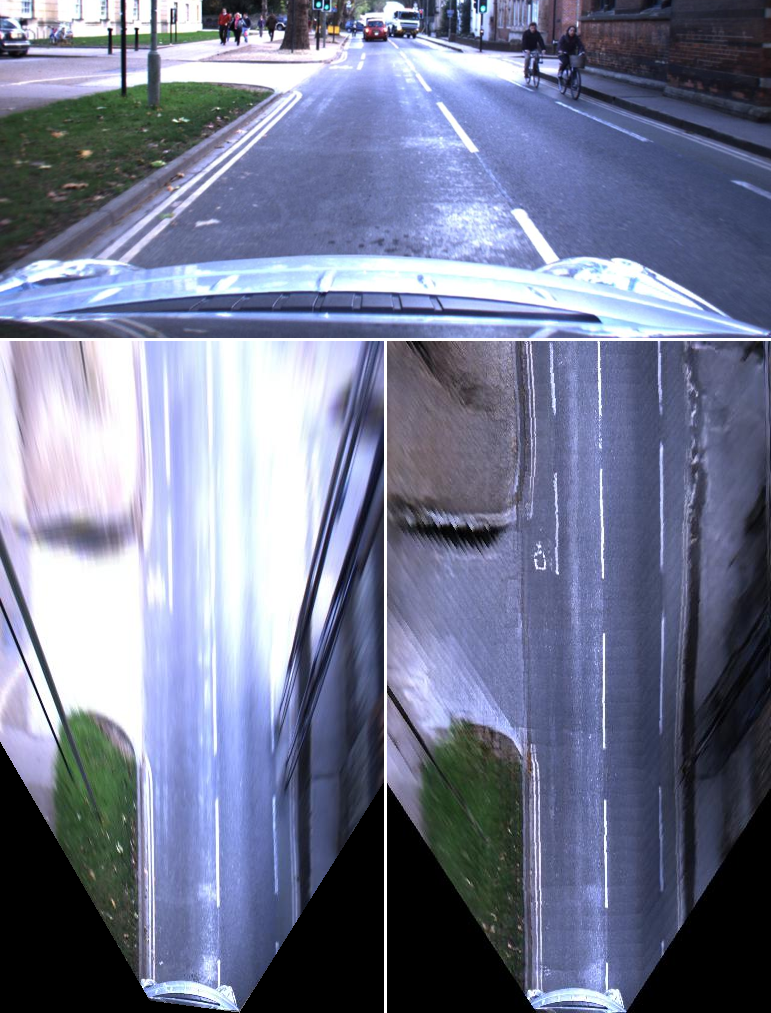
- BEV is a homography, but only make sense for the ground plane. 单应性Homograph估计:从传统算法到深度学习 - 白裳的文章 - 知乎
Multi-Depth Planes
(2023-12-17)
Given camera parameters of a reference view and a source view in the world space respectively, and multiple depth planes, solve the homographies that transforming the source image into the reference camera space:
The formula used in MVSNet-tf code is: $𝐊ᵢ𝐑ᵢ ( 𝐈 - \frac{-(-𝐑₁⁻¹𝐭₁+𝐑ᵢ⁻¹𝐭ᵢ) (-𝐧ᵀ 𝐑₁)}{d})𝐑₁⁻¹𝐊₁⁻¹$ because the $-𝐧ᵀ 𝐑₁$ is the z-axis of 𝐑₁ in the world space.
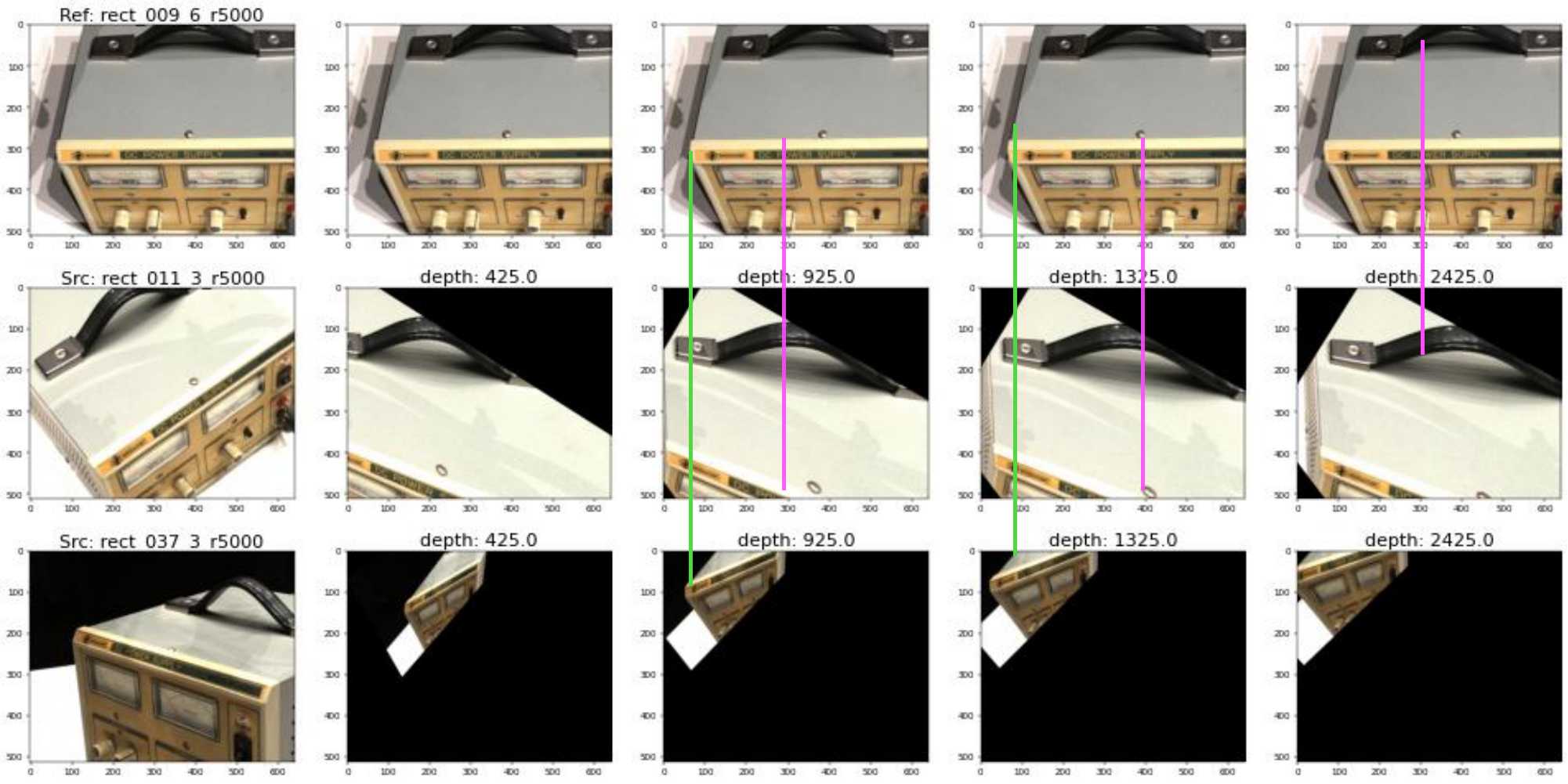
A source images is warped to the reference camera space and watching a common depth plane. Therefore, the points on the depth plane will have the same x coordinates as the points in the reference image.
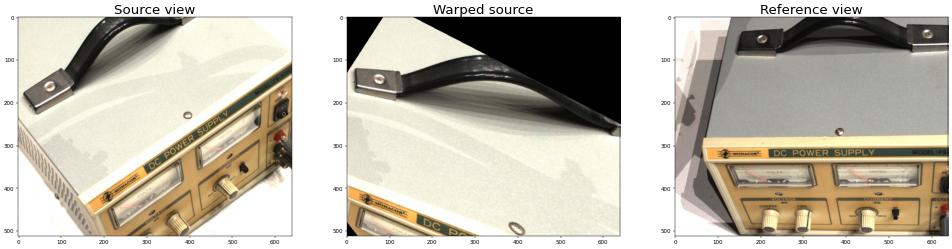
Warp by Sampling
(2023-12-18)
Sample the source image to be warped at the locations that is determined by the mapping of homography inversely from the target view to the source view. Refer to MVSNet-pytorch.
|
|
The result is almost the same as the one yielded by opencv:
4 Co-planar Points
(2022-12-03)
Homography matrix builds the relatioship between 2 images to make the pixels corresponding to the same 3D points overlap ³ based on the projection from the common 3D point to different image planes.
In following example, two cameras look at a flat plane. And they both observe the points located on that flat plane.
Then, the matching pixels on the two camera planes can be connected by the chain: img1 ➔ plane0 ➔ img2.
When a 3D world point is projected to 2D camera plane, the coordinates transformation consists of two matrix: extrinsic matrix [R|T] transforming the coordinate system, and the intrinsic matrix [K] projecting the 3D point to a 2D pixel, that is:
$$ \begin{bmatrix} u\\ v\\ 1\\ 1 \end{bmatrix} = \begin{bmatrix} f/dₓ & 0 & cₓ & 0 \\ 0 & f/d_y & c_y & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 &1 \end{bmatrix} \begin{bmatrix} r₁₁ & r₁₂ & r₁₃ & t₁ \\ r₂₁ & r₂₂ & r₂₃ & t₂ \\ r₃₁ & r₃₂ & r₃₃ & t₃ \\ 0 & 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} X \\ Y \\ Z \\ W \end{bmatrix} $$
where the W is the homogeneous coordinate for accommodating the translation vector $[^{^{t₁}_{t₂}} _{^{t₃}_{1}}]$ in the extrinsic matrix.
Omit z because all points on the plane have z=0.
Given $[^{_{x₁}}_{^{y₁}_{w₁}}]$ = H₁₀ $[^{_{x₀}}_{^{y₀}_{w₀}}]$, then there is $$\rm [^{_{x₂}}_{^{y₂}_{w₂}}] = H₂₀ H₁₀⁻¹[^{_{x₁}}_{^{y₁}_{w₁}}]$$, where H₂₀ H₁₀⁻¹ is the homograhpy matrix H₃ₓ₃. It represents the mapping between the pair of points: (x₁,y₁,w₁) and (x₂,y₂,w₂).
$$ \begin{bmatrix} x₂\\ y₂\\ w₂ \end{bmatrix} = \begin{bmatrix} H₁₁ & H₁₂ & H₁₃ \\ H₂₁ & H₂₂ & H₂₃ \\ H₃₁ & H₃₂ & H₃₃ \\ \end{bmatrix} \begin{bmatrix} x₁\\ y₁\\ w₁ \end{bmatrix} $$
Expand the above equation, there are 2 equations (with considering x₂’=x₂/w₂, y₂’=y₂/w₂, such that w = 1):
$$\begin{cases} x₂’ = \frac{x₂}{w₂} = \frac{H₁₁x₁ + H₁₂y₁ + H₁₃w₁}{H₃₁x₁ + H₃₂y₁ + H₃₃w₁} \\ y₂’ = \frac{y₂}{w₂} = \frac{H₂₁x₁ + H₂₂y₁ + H₂₃w₁}{H₃₁x₁ + H₃₂y₁ + H₃₃w₁}\end{cases} \\ ⇓ \\ \rm\{^{x₂’H₃₁x₁ + x₂’H₃₂y₁ + x₂’H₃₃w₁ - H₁₁x₁ - H₁₂y₁ - H₁₃w₁ = 0} _{y₂’H₃₁x₁ + y₂’H₃₂y₁ + y₂’H₃₃w₁ - H₂₁x₁ - H₂₂y₁ - H₂₃w₁ = 0} $$
The last element H₃₃ is determined when other elements are set, so the degree of freedom for this matrix is 8.
Therefore, the homography matrix can be solved from 4 pairs of matching points: (x₁,y₁)-(x₂,y₂); (x₃,y₃)-(x₄,y₄); (x₅,y₅)-(x₆,y₆); (x₇,y₇)-(x₈,y₈).
After reformalizing the equation system to a matrix form, the sigular value decomposition can be applied.
$$\rm{ [^{^{^{-x₁\; -y₁\; -w₁\; 0\quad 0\quad 0\quad x₂’x₁\quad x₂’y₁\quad x₂’w₁} _{0\quad 0\quad 0\quad -x₁\; -y₁\; -w₁\; y₂’x₁\quad y₂’y₁\quad y₂’w₁}} _{^{-x₃\; -y₃\; -w₃\; 0\quad 0\quad 0\quad x₄’x₃\quad x₄’y₃\quad x₄’w₃} _{0\quad 0\quad 0\quad -x₃\; -y₃\; -w₃\; y₄’x₃\quad y₄’y₃\quad y₄’w₃}}} _{^{^{pair3-1}_{pair3-2}} _{^{pair4-1}_{pair4-2}}}] \ [^{^{^{H₁₁}_{H₁₂}} _{^{H₁₃}_{H₂₁}}} _{^{^{H₂₂}_{H₂₃}} _{^{H₃₁}_{^{H₃₂}_{H₃₃}}}}] = 0 } $$
Solution
This is a homogeneous linear system 𝐀𝐡=0, so its solution has 2 cases:
-
If the number of non-zero rows of the coefficients matrix 𝐀 after Gaussian elimination is less than the number of unknowns of 𝐡, i.e., (rank(𝐀) < #h), there is only the zero solution;
-
Or infinitely many non-zero solution, but only the solution satisfying constraints of magnitude is selected.
If 𝐀 is invertible (square matrix & rank(𝐀) = #col), then 𝐡=𝐀⁻¹⋅0 = 0 ???
Otherwise, if 𝐀 is not invertible, there would be inifinetly many non-zero solutions. So the optimal solution should be approached by minimizing the error $$J = ½‖𝐀𝐡-0‖²$$ Therefore, the least-square solution is when the derivative
$$ ∂J/∂𝐡 = 0 \\ ⇒ 𝐀ᵀ(𝐀𝐡-0) = 0\\ ⇒ 𝐀ᵀ𝐀𝐡-𝐀ᵀ⋅0 = 0 $$
If 𝐀ᵀ𝐀 is invertible, the optimal 𝐡=(𝐀ᵀ𝐀)⁻¹𝐀ᵀ⋅0 = 0 ???, where the (𝐀ᵀ𝐀)⁻¹𝐀ᵀ is the pseudo-inverse matrix.
- Use all the matching pints to compute a robust H, even though 4 pairs are enough to solve the 8 unkowns (An element is 1 after scaling the matrix by it).
-
Constrained Least Squares. Solve for 𝐡: A𝐡=0, such that ‖𝐡‖²=1.
Define least squares problem: min_𝐡 ‖A𝐡‖², such that ‖𝐡‖²=1. We know that: ‖A𝐡‖² = (A𝐡)ᵀ(A𝐡) = 𝐡ᵀAᵀA𝐡, and ‖𝐡‖²= 𝐡ᵀ𝐡 =1. So the problem is: minₕ(𝐡ᵀAᵀA𝐡), such that 𝐡ᵀ𝐡 =1.Define Loss function L(𝐡,λ): L(𝐡,λ)= 𝐡ᵀAᵀA𝐡 - λ(𝐡ᵀ𝐡 -1). And take derivatives of L(𝐡,λ) w.r.t. 𝐡: 2AᵀA𝐡 - 2λ𝐡 =0. It’s the classical eigenvalue problem: AᵀA𝐡 = λ𝐡.
-
SVD.
Find the eigenvalue and eigenvectors of the matrix AᵀA. 𝐡 is he eighenvector with the smallest eigenvalue λ.
-
First Principles of CV-Dr.Shree;
Misc
- (2023-12-07) Epipolar geometry requires translation between cameras, whereas homography doesn’t. homography - Carleton University